
Brief Research Overview
Robot learning is a field that enables robots to acquire and
improve their capabilities through various learning techniques
and algorithms. At the SMART Lab, we push the boundaries of
robot intelligence through several interconnected research
directions. We develop advanced learning algorithms that
enhance robots' ability to perceive, reason about, and
interact with their environment. Another significant portion
of our research explores reinforcement learning approaches
that allow robots to learn optimal behaviors through
experience and interaction. We are particularly interested in
human-in-the-loop robot learning, including Learning from
Demonstration (LfD) and preference learning, which enables
robots to learn directly from human teachers and adapt to
human preferences. Recently, we have begun investigating how
generative AI technologies can revolutionize robot learning,
exploring ways to leverage large language models and other
generative AI systems to enhance robots' learning capabilities
and decision-making processes. This cutting-edge research aims
to create more adaptable and intelligent robotic systems that
can better understand and respond to human needs.
You can learn more about our current and past research on robot learning below.
Generative AI based Robot Reasoning and Learning (2022
- Present)

Description: Generative AI (GAI), particularly Large Language Models (LLMs) and Vision-Language Models (VLMs), represents a groundbreaking advancement in artificial intelligence. These foundation models, trained on vast datasets of knowledge and experience, exhibit remarkable general reasoning capabilities that can be harnessed for robotics applications. At the SMART Lab, we are at the forefront of integrating generative AI with robotic systems to enhance their cognitive and learning abilities. Our recent research explores multiple innovative applications: utilizing LLMs for intelligent task allocation and coordination in multi-robot and human-robot teams; developing LLM-powered approaches for improved robot semantic navigation and scene understanding; and investigating how crowdsourced LLMs can serve as synthetic teachers in robot learning scenarios, providing valuable feedback and guidance. By harnessing the power of generative AI, we aim to revolutionize the way robots reason, learn, and interact, paving the way for more capable and adaptable robotic systems.
Grants: NSF (IIS #1846221), NSF (DRL #2418688), Purdue University
People: Vishnunandan Venkatesh, Ruiqi Wang, Taehyeon Kim, Ziqin Yuan, Ikechukwu Obi, Arjun Gupte
Selected Publications:
- L. N. Vishnunandan Venkatesh and Byung-Cheol Min,
"ZeroCAP: Zero-Shot Multi-Robot Context Aware Pattern
Formation via Large Language Models", IEEE International
Conference on Robotics and Automation (ICRA), Atlanta, USA,
19-23 May, 2025. (Accepted) Paper
Link, Video
Link
- Ruiqi Wang*, Dezhong Zhao*, Ziqin Yuan, Ike Obi, and Byung-Cheol Min (* equal contribution), "PrefCLM: Enhancing Preference-based Reinforcement Learning with Crowdsourced Large Language Models", IEEE Robotics and Automation Letters, Vol. 10, No. 3, pp. 2486-2493, March 2025. Paper Link, Video Link
- Shyam Sundar Kannan*, L. N. Vishnunandan Venkatesh*, and Byung-Cheol Min (*equal contribution), "SMARTLLM: Smart Multi-Agent Robot Task Planning using Large Language Models", 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Abu Dhabi, UAE, October 13-17, 2024. Paper Link, Video Link
- Taehyeon Kim and Byung-Cheol Min, "Semantic Layering in Room Segmentation via LLMs", 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Abu Dhabi, UAE, October 13-17, 2024. Paper Link, Video Link
Preference-Based Reinforcement Learning (2021
- Present)

Description: Reinforcement Learning (RL)
traditionally requires precisely defined reward functions to
guide robot behavior, a challenging requirement in complex
human-robot interaction scenarios. Preference-based
Reinforcement Learning (PbRL) offers an innovative solution by
learning from human comparative feedback rather than
predefined rewards, making it more intuitive to teach robots
desired behaviors. At the SMART Lab, we are advancing PbRL
techniques to address key challenges in the field, such as the
need for efficient learning from minimal human feedback and
the complexity of modeling human preferences. Our research
focuses on developing algorithms that can better interpret
various forms of human feedback while requiring fewer
interactions. Through innovations like our feedback-efficient
active preference learning approach, we aim to make robot
learning more natural and practical for real-world
applications.
Grants: NSF (IIS #1846221), Purdue University
People: Ruiqi
Wang, Weizheng
Wang, Ziqin
Yuan, Ikechukwu
Obi
Selected Publications:
- Weizheng Wang, Chao Yu, Yu Wang, and Byung-Cheol Min, "Human-Robot Cooperative Distribution Coupling for Hamiltonian-Constrained Social Navigation", IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025. (Accepted) Paper Link, Video Link, Website Link
- Ruiqi Wang*, Dezhong Zhao*, Dayoon Suh, Ziqin Yuan, Guohua
Chen, and Byung-Cheol Min (*equal contribution),
"Personalization in Human-Robot Interaction through
Preference-based Action Representation Learning", IEEE
International Conference on Robotics and Automation (ICRA),
Atlanta, USA, 19-23 May, 2025. (Accepted) Paper
Link, Video
Link, Website
Link
- Weizheng Wang, Ruiqi Wang, Le Mao, and Byung-Cheol Min, "NaviSTAR: Benchmarking Socially Aware Robot Navigation with Hybrid Spatio-Temporal Graph Transformer and Active Learning", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link, GitHub Link
- Ruiqi Wang, Weizheng Wang, and Byung-Cheol Min, "Feedback-efficient Active Preference Learning for Socially Aware Robot Navigation", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, October 23-27, 2022. Paper Link, Video Link, GitHub Link
Learning from Demonstration (2021 -
Present)

Description: Learning from Demonstration
(LfD) is a powerful paradigm that enables robots to learn new
skills by observing and replicating human demonstrations. This
approach bridges the gap between human expertise and robot
capabilities, making it more intuitive for non-experts to
teach robots complex behaviors. At the SMART Lab, we are
advancing the frontiers of LfD research, with a particular
focus on its application to Multi-Robot Systems (MRS). While
traditional LfD has primarily focused on single-robot
scenarios, we are pioneering methods to extend these
principles to multiple robots working in coordination. Our
innovative framework leverages visual demonstrations to
capture intricate robot-object interactions and complex
collaborative behaviors. By developing sophisticated
algorithms that can translate human demonstrations into
coordinated multi-robot actions, we aim to make robot teaching
more accessible and efficient.
Grants: NSF (IIS #1846221), Purdue University
People: Vishnunandan Venkatesh, Taehyeon Kim, Ruiqi Wang
Selected Publications:
- L. N. Vishnunandan Venkatesh and Byung-Cheol Min, "Learning from Demonstration Framework for Multi-Robot Systems Using Interaction Keypoints and Soft Actor-Critic Methods", 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Abu Dhabi, UAE, October 13-17, 2024. Paper Link, Video Link
- Ruiqi Wang, Weizheng Wang, and Byung-Cheol Min, "Feedback-efficient Active Preference Learning for Socially Aware Robot Navigation", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, October 23-27, 2022. Paper Link, Video Link, GitHub Link
Visual Localization and Mapping (2022 -
Present)
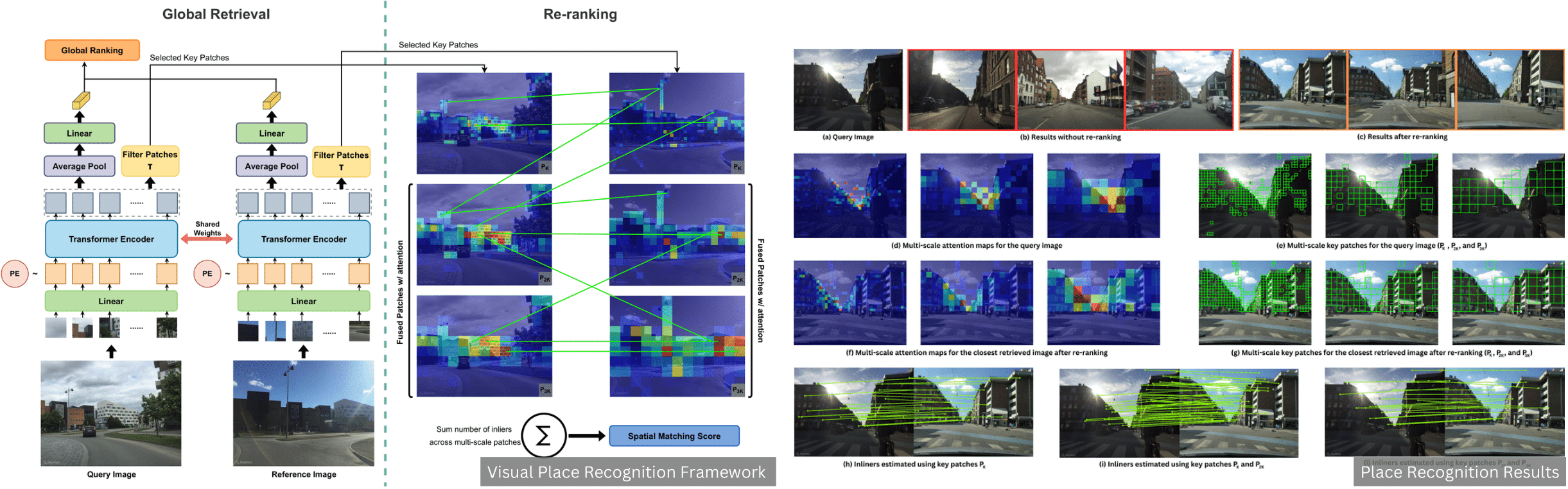
Description: Visual localization enables
autonomous vehicles and robots to navigate based on visual
observations of their operating environment. In visual
localization, the agent estimates its pose based on the image
from the camera. The operating environment of the agent can
undergo various changes due to illumination, day and night,
seasons, structural changes, and so on. In vision-based
localization, it is important to adapt to these changes that
can significantly impact visual perception. The SMART lab
investigates into developing methods that enable autonomous
agents to robustly localize despite these changes in the
surroundings. For example, we developed a visual place
recognition system that aids the autonomous agent in
identifying its location on a large-scale map by retrieving a
reference image that matches closely with the query image from
the camera. The prposed method utilizes consice descriptors
from the image, so that the image process can be done rapidly
with less memory consumption.
Grants: Purdue University
People: Shyam Sundar Kannan, Vishnunandan Venkatesh
Selected Publications:
- Shyam Sundar Kannan and Byung-Cheol Min, "ZeroSCD:
Zero-Shot Street Scene Change Detection", IEEE International
Conference on Robotics and Automation (ICRA), Atlanta, USA,
19-23 May, 2025. (Accepted) Paper
Link
- Shyam Sundar Kannan and Byung-Cheol Min, "PlaceFormer:
Transformer-based Visual Place Recognition using Multi-Scale
Patch Selection and Fusion", IEEE Robotics and Automation
Letters, Vol. 9, No. 7, pp. 6552-6559, July 2024. Paper Link
Learning-based Robot Recognition (2017 -
2022)
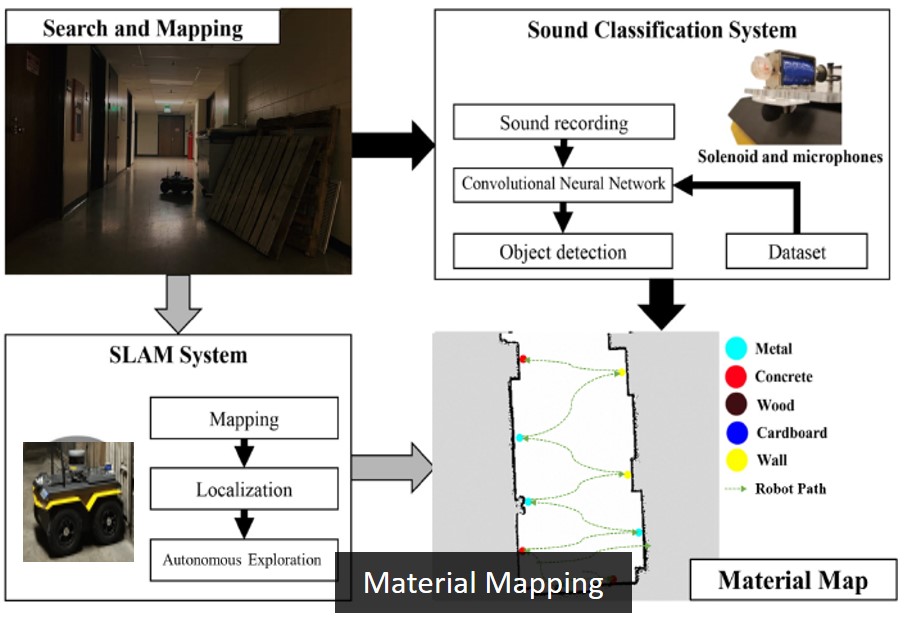
Description:The SMART Lab is researching
learning-based robot recognition technology to enable robots
to recognize and identify objects/scenes in real-time with
the same ease as humans, even in dynamic environments and
with limited information. We aim to apply our research and
developments to a variety of applications, including the
navigation of autonomous robots/cars in dynamic
environments, the detection of malware/cyberattacks, object
classification and reconstruction, the prediction of the
cognitive and affective states of humans, and the allocation
of workloads within human-robot teams. For example, we
developed a system in which a mobile robot autonomously
navigates an unknown environment through simultaneous
localization and mapping (SLAM) and uses a tapping mechanism
to identify objects and materials in the environment. The
robot taps an object with a linear solenoid and uses a
microphone to measure the resulting sound, allowing it to
identify the object and material. We used convolutional
neural networks (CNNs) to develop the associated
tapping-based material classification system.
Grants: Purdue University
People: Wonse
Jo, Shyam
Sundar Kannan, Go-Eum
Cha, Vishnunandan
Venkatesh, Ruiqi
Wang
Selected Publications:
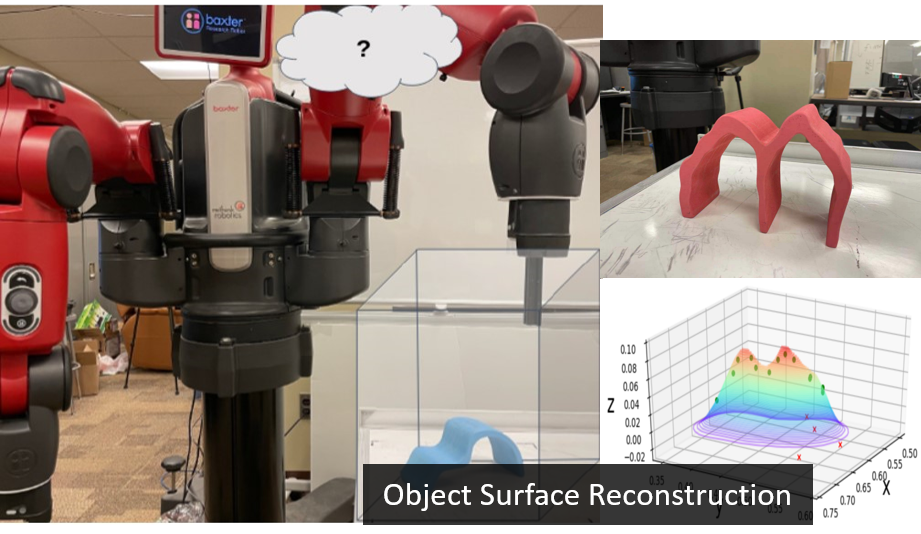
- Su Sun and Byung-Cheol Min, "Active Tapping via Gaussian Process for Efficient Unknown Object Surface Reconstruction", 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on RoboTac 2021: New Advances in Tactile Sensation, Interactive Perception, Control, and Learning. A Soft Robotic Perspective on Grasp, Manipulation, & HRI, Prague, Czech Republic, Sep 27 – Oct 1, 2021. Paper Link
- Shyam Sundar Kannan, Wonse Jo, Ramviyas Parasuraman, and Byung-Cheol Min, "Material Mapping in Unknown Environments using Tapping Sound", 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2020), Las Vegas, NV, USA, 25-29 October, 2020. Paper Link, Video Link
Application Offloading Problem (2018 -
2022)
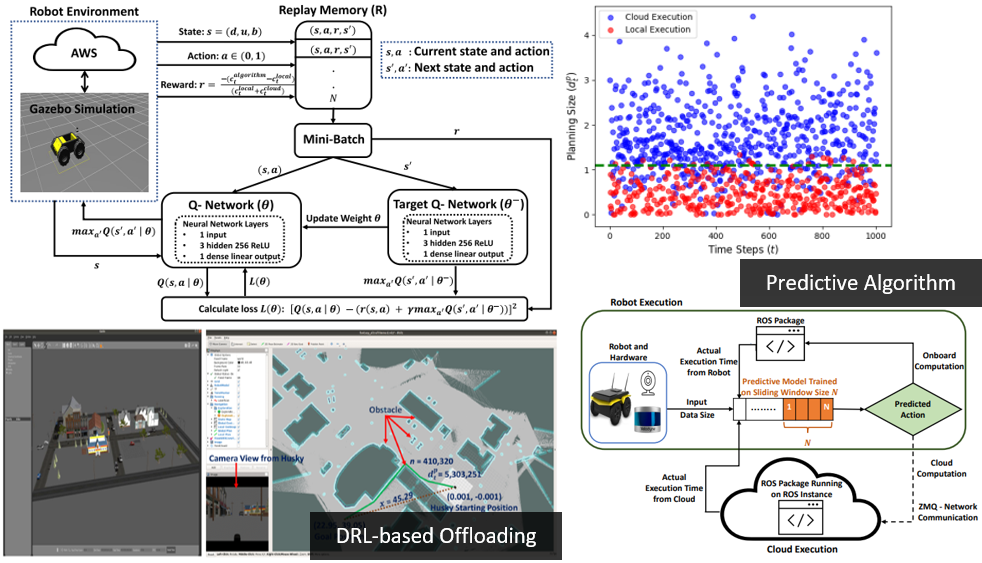
Description: Robots come with a variety
of computing capabilities, and running
computationally-intensive applications on robots can be
challenging due to their limited onboard computing, storage,
and power capabilities. Cloud computing, on the other hand,
provides on-demand computing capabilities, making it a
potential solution for overcoming these resource
constraints. However, effectively offloading tasks requires
an application solution that does not underutilize the
robot's own computational capabilities and makes decisions
based on cost parameters such as latency and CPU
availability. In this research, we address the application
offloading problem: how to design an efficient offloading
framework and algorithm that optimally uses a robot's
limited onboard capabilities and quickly reaches a consensus
on when to offload without any prior knowledge of the
application. Recently, we developed a predictive algorithm
to predict the execution time of an application under both
cloud and onboard computation, based on the size of the
application's input data. This algorithm is designed for
online learning, meaning it can be trained after the
application has been initiated. In addition, we formulated
the offloading problem as a Markovian decision process and
developed a deep reinforcement learning-based Deep Q-network
(DQN) approach.
Grants: Purdue University
People: Manoj Penmetcha , Shyam Sundar Kannan
Selected Publications:
- Manoj Penmetcha and Byung-Cheol Min, "A Deep Reinforcement Learning-based Dynamic Computational Offloading Method for Cloud Robotics", IEEE Access, Vol. 9, pp. 60265-60279, 2021. Paper Link, Video Link
- Manoj Penmetcha, Shyam Sundar Kannan, and Byung-Cheol Min, "A Predictive Application Offloading Algorithm using Small Datasets for Cloud Robotics", 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Virtual, Melbourne, Australia, 17-20 October, 2021. Paper Link, Video Link