
Brief Research Overview
Human-Robot Interaction (HRI) investigates the design and
development of robotic systems that can interact naturally and
effectively with humans. As robots increasingly become
integral parts of our society, the importance of creating
intuitive and reliable human-robot interactions has never been
more critical. The SMART Lab's journey in HRI research began
with pioneering work on assistive robots for visually impaired
travelers when Dr. Min worked on the NSF/NRI project at
Carnegie Mellon University. Since then, our HRI research
portfolio has expanded to several cutting-edge areas,
including multi-human multi robot systems, human-multi
robot/swarm interaction, affective computing, socially-aware
robot navigation, human-machine interfaces, and assistive
technology and robotics.
You can learn more about our current and past research on human-robot interaction below.
Human Multi-robot Systems (2018 - Present)


Description: The emerging field of
human multi-robot systems and multi-human multi-robot
interaction explores how teams of humans and multiple robots
can effectively collaborate. This cutting-edge research area
has transformative potential for complex operations including
environmental exploration, surveillance, and disaster
response. Drawing on our extensive expertise in multi-robot
systems, swarm robotics, human-robot interaction, and
assistive technology, the SMART Lab is developing
groundbreaking solutions in this domain. Our current research
focuses on creating distributed algorithms that enable
seamless robot-to-robot collaboration, developing adaptive
interaction systems that allow robots to work efficient with
humans in diverse environments and scenarios, and building
practical applications that demonstrate the real-world
potential of human multi-robot systems. Our vision is to
democratize human-robot collaboration, making it accessible to
everyone: from novice users to those with disabilities. We are
working toward a future where humans and robot teams can
seamlessly partner on a wide range of practical tasks,
regardless of the users' technical expertise or the number of
robots involved.
Grant: NSF (IIS #1846221), NSF (CMMI #2222838), NSF (DRL #2418688)
People: Ruiqi
Wang, Vishnunandan
Venkatesh, Ikechukwu
Obi, Arjun
Gupte, Jeremy
Pan, Wonse
Jo, Go-Eum
Cha
Project Website: https://polytechnic.purdue.edu/ahmrs
Selected Publications:
- Ziqin Yuan*, Ruiqi Wang*, Taehyeon Kim, Dezhong Zhao, Ike
Obi, and Byung-Cheol Min (*equal contribution), "Adaptive
Task Allocation in Multi-Human Multi-Robot Teams under Team
Heterogeneity and Dynamic Information Uncertainty", IEEE
International Conference on Robotics and Automation (ICRA),
Atlanta, USA, 19-23 May, 2025. (Accepted) Paper
Link, Video
Link, Website
Link
- Wonse Jo, Ruiqi Wang, Baijian Yang, Dan Foti, Mo Rastgaar, and Byung-Cheol Min, "Cognitive Load-based Affective Workload Allocation for Multi-Human Multi-Robot Teams", IEEE Transactions on Human-Machine Systems, Vol. 55, No. 1, pp. 23-36, February 2025. Paper Link, Video Link
- Wonse Jo*, Ruiqi Wang*, Go-Eum Cha, Su Sun, Revanth Senthilkumaran, Daniel Foti, and Byung-Cheol Min (* equal contribution), "MOCAS: A Multimodal Dataset for Objective Cognitive Workload Assessment on Simultaneous Tasks", IEEE Transactions on Affective Computing, Early Access, 2024. Paper Link, Video Link
- Ruiqi Wang*, Dezhong Zhao*, Arjun Gupte, and Byung-Cheol Min (* equal contribution), "Initial Task Assignment in Multi-Human Multi-Robot Teams: An Attention-enhanced Hierarchical Reinforcement Learning Approach", IEEE Robotics and Automation Letters, Vol. 9, No. 4, pp. 3451-3458, April 2024. Paper Link, Video Link
- Ruiqi Wang, Dezhong Zhao, and Byung-Cheol Min, "Initial Task Allocation for Multi-Human Multi-Robot Teams with Attention-based Deep Reinforcement Learning", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link
- Ahreum Lee, Wonse Jo, Shyam Sundar Kannan, and Byung-Cheol Min, "Investigating the Effect of Deictic Movements of a Multi-robot", International Journal of Human-Computer Interaction, Vol 37, No. 3, pp. 197-210, 2021. Paper Link, Video Link
- Tamzidul Mina, Shyam Sundar Kannan, Wonse Jo, and
Byung-Cheol Min, "Adaptive Workload Allocation for
Multi-human Multi-robot Teams for Independent and
Homogeneous Tasks", IEEE Access, Vol. 8, pp. 152697-152712,
2020. Paper Link, Video Link
Socially-Aware Robot Navigation (2021 -
Present)
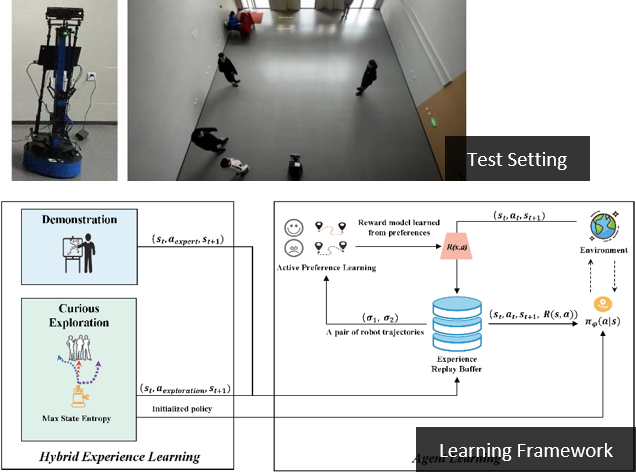
Description: Socially-aware robot
navigation (SAN) represents a fundamental challenge in
human-robot interaction, where robots must navigate to their
goals while maintaining comfortable and socially appropriate
interactions with humans. This complex task requires robots to
understand and respect human spatial preferences and social
norms while avoiding collisions. While learning-based
approaches have shown promise compared to traditional
model-based methods, significant challenges remain in
capturing the full complexity of crowd dynamics. These include
the subtle interplay of human-human and human-robot
interactions, and how various environmental contexts influence
social behavior. The SMART Lab's research advances this field
by developing sophisticated algorithms that better encode and
interpret intricate social dynamics across diverse
environments. Through innovative deep learning techniques, we
enable robots to understand and adapt to human behavioral
patterns in different contexts. Our work aims to create
navigation systems that demonstrate unprecedented awareness of
social nuances, leading to more natural and acceptable robot
movement in human spaces.
Grant: NSF (IIS #1846221)
People: Ruiqi
Wang, Weizheng
Wang
Project Website: https://sites.google.com/view/san-fapl;
https://sites.google.com/view/san-navistar
Selected Publications:
- Weizheng Wang, Aniket Bera, and Byung-Cheol Min, "Hyper-SAMARL: Hypergraph-based Coordinated Task Allocation and Socially-aware Navigation for Multi-Robot Systems", IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025. (Accepted) Paper Link, Video Link, Website Link
- Weizheng Wang, Chao Yu, Yu Wang, and Byung-Cheol Min, "Human-Robot Cooperative Distribution Coupling for Hamiltonian-Constrained Social Navigation", IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, 19-23 May, 2025. (Accepted) Paper Link, Video Link, Website Link
- Weizheng Wang, Le Mao, Ruiqi Wang, and Byung-Cheol Min, "Multi-Robot Cooperative Socially-Aware Navigation using Multi-Agent Reinforcement Learning", International Conference on Robotics and Automation (ICRA), Yokohama, Japan, May 13-17, 2024. Paper Link, Video Link
- Weizheng Wang, Ruiqi Wang, Le Mao, and Byung-Cheol Min, "NaviSTAR: Benchmarking Socially Aware Robot Navigation with Hybrid Spatio-Temporal Graph Transformer and Active Learning", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link, GitHub Link
- Ruiqi Wang, Weizheng Wang, and Byung-Cheol Min, "Feedback-efficient Active Preference Learning for Socially Aware Robot Navigation", 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, October 23-27, 2022. Paper Link, Video Link, GitHub Link
Affective Computing (2019 - Present)
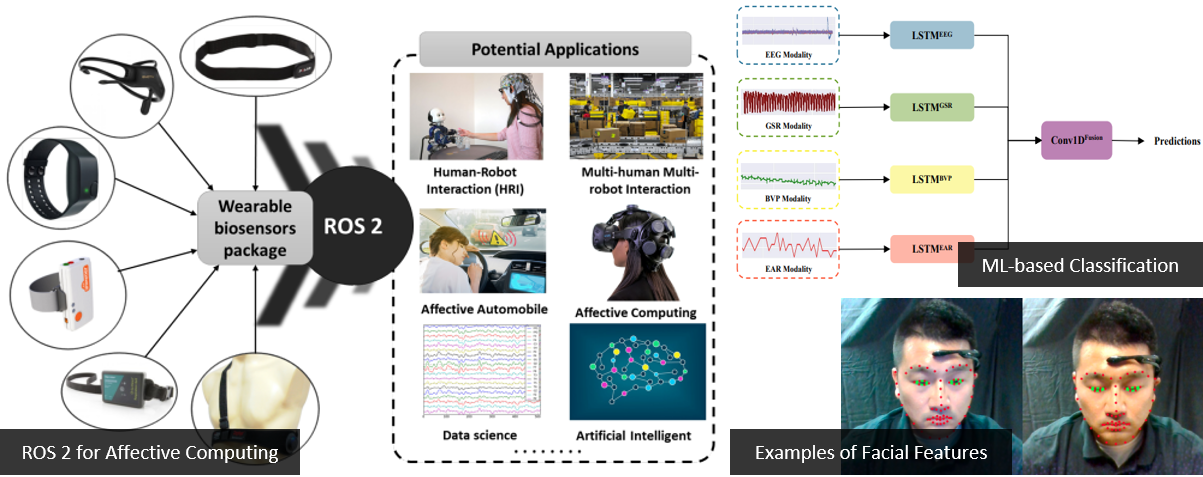
Description: The estimation of human
affective states such as emotional states and cognitive
workloads for effective human-robot interaction has gained
increased attention. The emergence of new robotics middleware
such as ROS has also contributed to the growth of HRI research
that integrates affective computing with robotics systems. We
believe that human affective states play a significant role in
human-robot interaction, especially human-robot collaboration,
and we are conducting various research on affective computing,
from framework design to dataset design/creation and algorithm
development. For example, we recently developed a ROS-based
framework that enables the simultaneous monitoring of various
human physiological and behavioral data and robot conditions
for human-robot collaboration. We also developed and published
a ROS-friendly multimodal dataset comprising physiological
data measured using wearable devices and behavioral data
recorded using external devices. Currently, we are exploring
machine learning and deep learning-based methods (e.g., using
Transformer) for real-time prediction of human affective
states.
Grant: NSF (IIS #1846221)
People: Wonse
Jo, Go-Eum
Cha, Ruiqi
Wang, Revanth Krishna Senthilkumaran
Project Website: https://polytechnic.purdue.edu/ahmrs
Selected Publications:
- Jinjin Cai*, Ruiqi Wang*, Dezhong Zhao, Ziqin Yuan, Victoria McKenna, Aaron Friedman, Rachel Foot, Susan Storey, Ryan Boente, Sudip Vhaduri, and Byung-Cheol Min (*equal contribution), "Multimodal Audio-based Disease Prediction with Transformer-based Hierarchical Fusion Network", IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2025. (In Press) Paper Link, Website Link, GitHub Link
- Ruiqi Wang*, Wonse Jo*, Dezhong Zhao, Weizheng Wang, Baijian Yang, Guohua Chen, and Byung-Cheol Min (* equal contribution), "Husformer: A Multi-Modal Transformer for Multi-Modal Human State Recognition", IEEE Transactions on Cognitive and Developmental Systems, Vol. 16, No. 4, pp. 1374-1390, August 2024. Paper Link, GitHub Link
- Wonse Jo*, Ruiqi Wang*, Go-Eum Cha, Su Sun, Revanth Senthilkumaran, Daniel Foti, and Byung-Cheol Min (* equal contribution), "MOCAS: A Multimodal Dataset for Objective Cognitive Workload Assessment on Simultaneous Tasks", IEEE Transactions on Affective Computing, Early Access, 2024. Paper Link, Video Link
- Go-Eum Cha, Wonse Jo, and Byung-Cheol Min, "Implications of Personality on Cognitive Workload, Affect, and Task Performance in Robot Remote Control", 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), Detroit, USA, October 1-5, 2023. Paper Link, Video Link
- Go-Eum Cha and Byung-Cheol Min, "Correlation between Unconscious Mouse Actions and Human Cognitive Workload", 2022 ACM CHI Conference on Human Factors in Computing Systems - Late-Breaking Work, New Orleans, LA, USA, April 30–May 6, 2022. Paper Link, Video Link
Human-Delivery Robot Interaction (2019 -
2023)
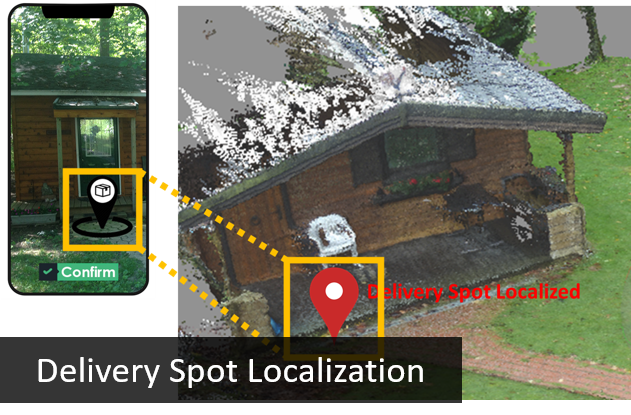

Description: As delivery robots
become more capable and necessary for quick and economic
delivery of goods, there is increasing interest in using
robots for last-mile delivery. However, current research and
services involving delivery robots are still far from meeting
the growing demand in this area, let alone being fully
integrated into our lives. The SMART Lab investigates various
practical and theoretical topics in robot delivery, including
vehicle routing for drones, localization of a requested
delivery spot, and social interaction between package
recipients and delivery robots. To do this, we use
mathematical methods to solve optimization problems and
conduct experimental methods based on user studies. We expect
that this research will play a major role in enabling delivery
robots to deliver packages more intelligently and effectively,
like professional human couriers, and that it will improve
human-delivery robot interaction while increasing robot
autonomy.
Grant: Purdue University
People: Shyam Sundar Kannan, Ahreum Lee
Selected Publications:
- Shyam Sundar Kannan and Byung-Cheol Min, "Autonomous Drone Delivery to Your Door and Yard", 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, June 21-24, 2022. Paper Link, Video Link
- Shyam Sundar Kannan and Byung-Cheol Min, "Investigation on Accepted Package Delivery Location: A User Study-based Approach", 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Virtual, Melbourne, Australia, 17-20 October, 2021. Paper Link
- Shyam Sundar Kannan, Ahreum Lee, and Byung-Cheol Min, "External Human-Machine Interface on Delivery Robots: Expression of Navigation Intent of the Robot", 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Virtual, Vancouver, Canada, 8-12 August, 2021. Paper Link, Video Link
- Patchara Kitjacharoenchai, Byung-Cheol Min, and Seokcheon Lee, "Two Echelon Vehicle Routing Problem with Drones in Last Mile Delivery", International Journal of Production Economics, Vol. 25, 2020. Paper Link
Assistive Technology and Robots for People who are Blind or Visually Impaired (2014 - 2018)
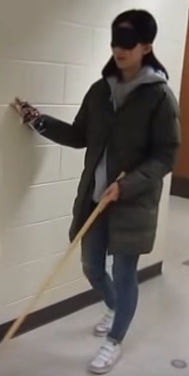
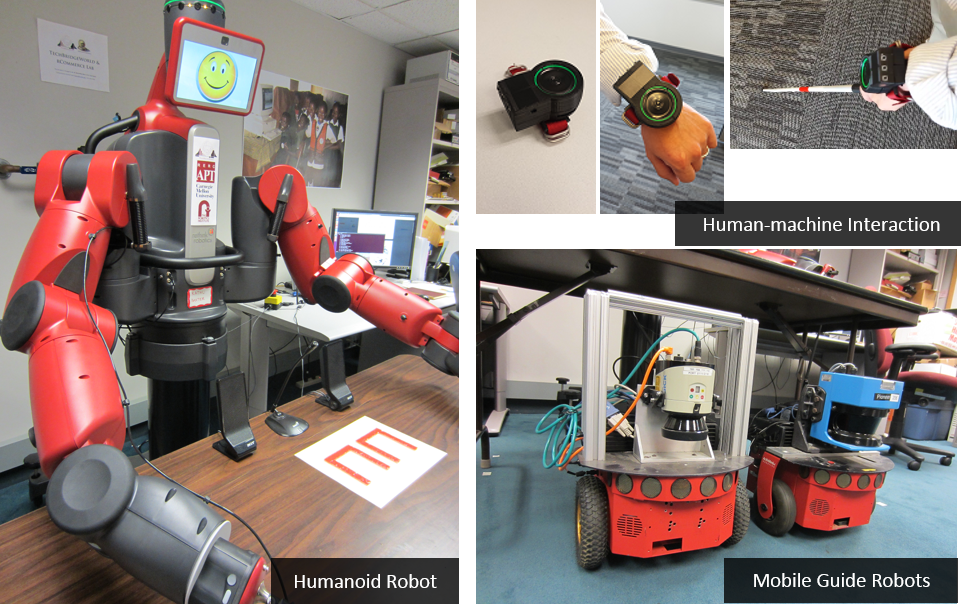
Description: The World Health Organization
(WHO) estimates that 285 million people in the world are
visually impaired, with 39 million being blind. While safe and
independent mobility is essential in modern life, traveling in
unfamiliar environments can be challenging and daunting for
people who are blind or visually impaired due to a lack of
appropriate navigation aid tools. To address this challenge,
the SMART Lab investigates practical and theoretical research
topics on human-machine interaction and human-robot
interaction in the context of assistive technology and
robotics. Our primary research goal is to empower people with
disabilities to safely and independently travel to and
navigate unfamiliar environments. To achieve this, we have
developed improved and appropriate navigation aid tools that
will enable visually impaired people to travel unfamiliar
environments safely and independently with minimal training
and effort. We have also introduced an indoor navigation
application for a blind user to request help based on
emergency and non-emergency situations.
Grants: Purdue University
People: Yeonju
Oh, Manoj
Penmetcha, Arabinda
Samantaray
Selected Publications:
- Yeonju Oh, Wei-Liang Kao, and Byung-Cheol Min, "Indoor Navigation Aid System Using No Positioning Technique for Visually Impaired People", HCI International 2017 - Poster Extended Abstract, Vancouver, Canada, 9-14 July, 2017. Paper Link, Video Link
- Manoj Penmetcha, Arabinda Samantaray, and Byung-Cheol Min, "SmartResponse: Emergency and Non-Emergency Response for Smartphone based Indoor Localization applications", HCI International 2017 - Poster Extended Abstract, Vancouver, Canada, 9-14 July, 2017. Paper Link
- Byung-Cheol Min, Suryansh Saxena, Aaron Steinfeld, and M. Bernardine Dias, “Incorporating Information from Trusted Sources to Enhance Urban Navigation for Blind Travelers", Robotics and Automation (ICRA), 2015 IEEE International Conference on, pp.4511-4518, Seattle, USA, May 26-30, 2015. (Paper Link)
- Byung-Cheol Min, Aaron Steinfeld, and M. Bernardine Dias, “How Would You Describe Assistive Robots to People Who are Blind or Low Vision?", Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (HRI) Extended Abstracts, Portland, USA, Mar. 2-5, 2015. (Paper Link)
Assistive Technology and Robots for Children with Autism Spectrum Disorder (ASD) (2015 - 2017)
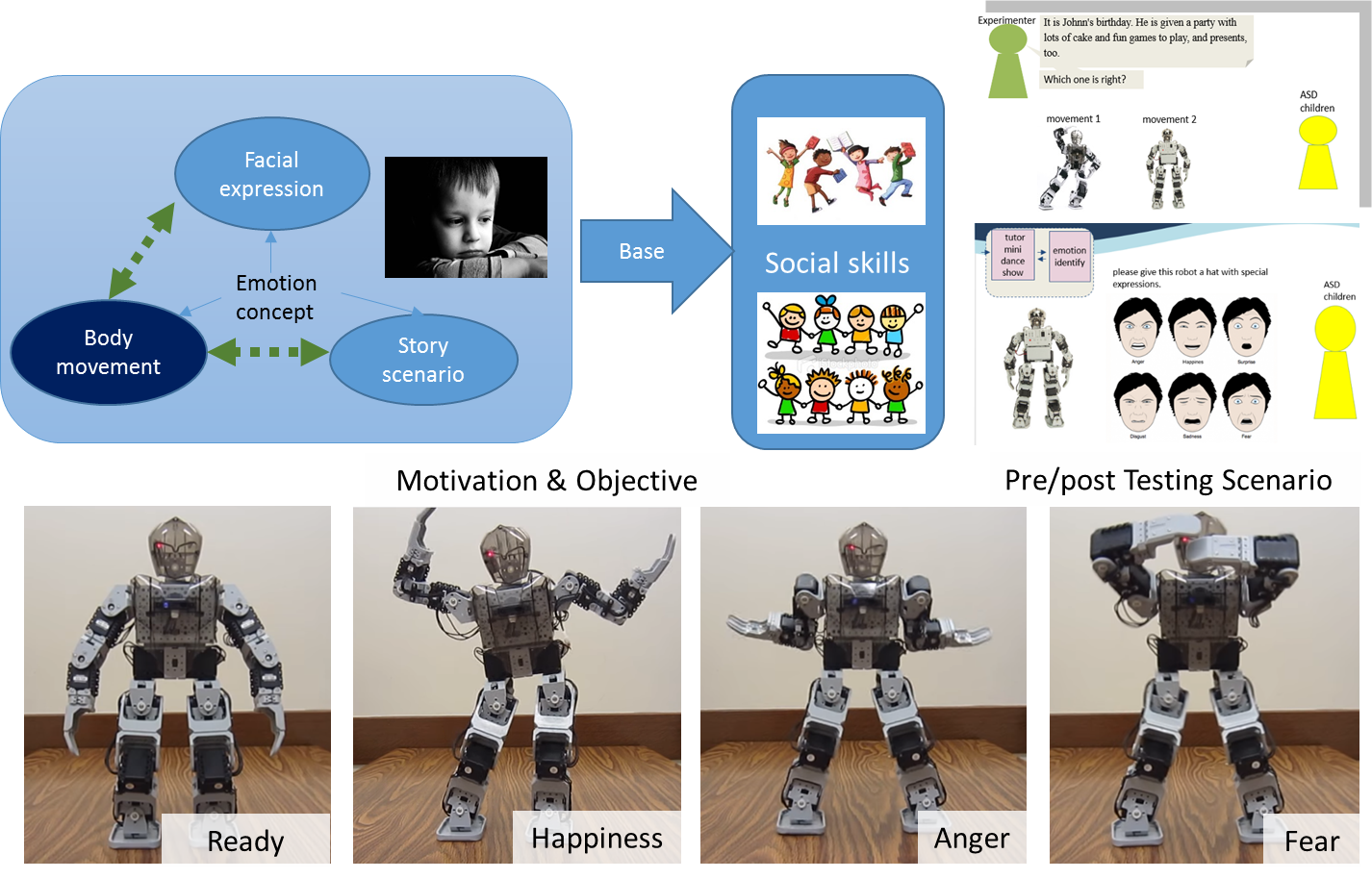
Description: Autism spectrum disorder
(ASD) is one of the most significant public health concerns in
the United States and globally. Children with ASD have
impaired ability in social interaction, social communication,
and imagination and often have poor verbal ability. Several
approaches have been used to help them, including the use of
humanoid robots as a new tool for teaching them. Robots can
offer simplified physical features and a controllable
environment that are preferred by autistic children, as well
as a human-like conversational environment suitable for
learning about emotions and social skills. The SMART Lab is
designing a set of robot body movements that express different
emotions and a robot-mediated instruction prototype to explore
the potential of robots to teach emotional concepts to
autistic children. We are also studying a technical
methodology that can be easily deployed in the daily
environment of children with ASD and teach language to them at
low cost, based on embedded devices and semantic information
that can be extended to a cyber-physical system in the future.
This method will provide verbal descriptions of objects and
adapt the level of descriptions to the child's learning
achievements.
Grants: Purdue University
People: Huanhuan Wang, Pai-Ying Hsiao,
Sangmi Shin
Selected Publications:
- Sangmi Shin, Byung-Cheol Min, Julia Rayz, and Eric T. Matson, "Semantic Knowledge-based Language Education Device for Children with Developmental Disabilities", IEEE Robotic Computing (IRC) 2017, Taichung, Taiwan, April 10-12, 2017. Download PDF
- Huanhuan Wang, Pai-Ying Hsiao, and Byung-Cheol Min, "Examine the Potential of Robots to Teach Autistic Children Emotional Concepts", The Eight International Conference on Social Robotics (ICSR), Kansas City, USA, Nov. 1-3, 2016. Download PDF