
Brief Research Overview
The SMART Lab is an interdisciplinary research group made up
of members with diverse backgrounds in fields such as
robotics, computing, electrical engineering, control
engineering, and mechanical engineering. This uniqueness plays
a pivotal role in designing, modelling and controlling new
robots, and developing algorithms and systems for their
practical application in field robotics and assistive
technology. Our team has extensive experience in both the
software and hardware aspects of robot design and control, by
creating a range of new robotic and autonomous systems
including mobile robots, aquatic robots, and assistive robotic
systems. Many of these systems are low-cost and open-source (SMART
Lab GitHub), making them accessible to a wider range of
users who may have been priced out by more expensive options.
You can learn more about our current and past research on robot design and control below.
Low-cost and Open-source Robot Platforms (2017
- 2023)
Description: Low-cost,
open-source-based robotic platforms have great value and
potential for a variety of purposes. For instance, they
enable researchers in the field of robotics to conduct
practical experiments, thereby advancing their research more
effectively. Additionally, they allow K-12 and college
students to engage in hands-on activities and learn about
robotics more effectively. These platforms also provide
opportunities for end users who are interested in robots but
have been priced out due to high costs. However, there are
currently only a few available low-cost, open-source robotic
platforms. The SMART Lab is using its accumulated software
and hardware development experience to create various types
of robots, such as mobile and aquatic robots, that are
affordable and easy for anyone to build. We share all our
source code and hardware-related materials through online
repositories such as GitHub.
Grants: NSF, UNSA, Purdue University
People: Wonse
Jo, Pou
Hei Chan, Jaeeun
Kim, Jee
Hwan Park, Yuta
Hoashi
Selected Publications:
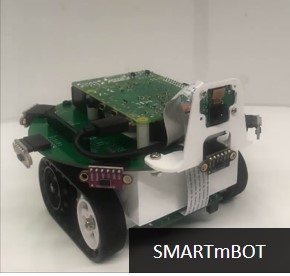
- Wonse Jo, Jaeeun Kim, Ruiqi Wang, Jeremy Pan, Revanth
Krishna Senthilkumaran, and Byung-Cheol Min, "SMARTmBOT: A
ROS2-based Low-cost and Open-Source Mobile Robot
Platform", arXiv preprint, arXiv:2203.08903, 2022. Paper Link, GitHub Link, Video Link
- Wonse Jo, Jaeeun Kim, and Byung-Cheol Min, "ROS2
Open-Source Swarm Robot Platform: SMARTmBot", 2021
International Conference on Robotics and Automation
(ICRA), Workshop on Robot Swarms in the Real World: From
Design to Deployment - Live Demonstration, Xi'an, China,
May 30 - June 5, 2021. Paper Link, GitHub Link, Video Link
- Jun Han Bae, Shaocheng Luo, Shyam Sundar Kannan, Yogang Singh, Bumjoo Lee, Richard M. Voyles, Mauricio Postigo-Malaga, Edgar Gonzales Zenteno, Lizbeth Paredes Aguilar, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Remote Sediment Sampling with a Van Veen Grab Sampler", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
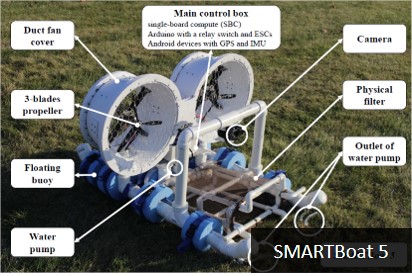
- Wonse Jo, Jee Hwan Park, Yuta Hoashi, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Harmful Algae Removal", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
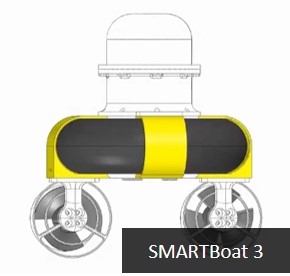
- Wonse Jo, Yuta Hoashi, Lizbeth Leonor Paredes Aguilar, Mauricio Postigo-Malaga, José Garcia-Bravo, and Byung-Cheol Min, "A Low-cost and Small USV Platform for Water Quality Monitoring", HardwareX, Vol. 6, e00076, October 2019. Paper Link, Video Link , Source Codes Link
Water Quality Monitoring and Sediment Sampling (2016
- 2022)
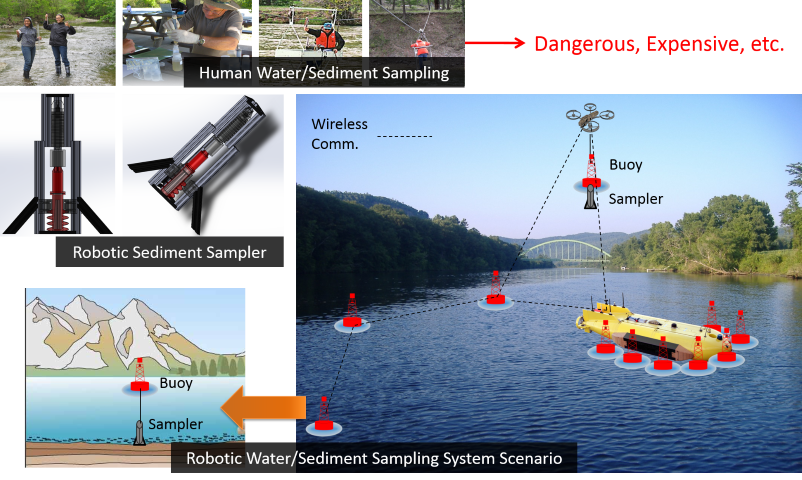
Description: All life depends on
water, and we are all part of watersheds. However, human
activities can often lead to contamination that disrupts and
damages both biological and social communities.
Contamination of sediments with pollutants such as heavy
metals can harm aquatic habitats and even affect human
health. Late recognition of a water crisis can be costly and
require significant recovery time, and can also create
social and political conflict. Therefore, regular monitoring
of water and sediment quality through sampling is crucial.
The SMART Lab is currently developing a novel cyber-physical
system for water and sediment sampling, combining control
software and mobile robots to conduct autonomous monitoring
and analysis. Our research will improve our understanding of
how to effectively sample water and sediments with robotic
systems and verify the ability of cyber-physical systems to
enable real-time data processing in water quality
monitoring. We believe these efforts will significantly
advance the state-of-the-art in robotic environmental
monitoring.
Grants: NSF, UNSA, Purdue University
People: Jun Han Bae, Pou Hei Chan, Shaocheng Luo, Wonse Jo, Yogang Singh, Yuta Hoashi
Project Website: https://engineering.purdue.edu/PRWQ
Selected Publications:
- Jun Han Bae, Wonse Jo, Jee Hwan Park, Richard M. Voyles, Sara K. McMillan and Byung-Cheol Min, "Evaluation of Sampling Methods for Robotic Sediment Sampling Systems", IEEE Journal of Oceanic Engineering, Vol. 46, No. 2, pp. 542-554, April 2021. Paper Link, Video Link
- Jun Han Bae, Shaocheng Luo, Shyam Sundar Kannan, Yogang Singh, Bumjoo Lee, Richard M. Voyles, Mauricio Postigo-Malaga, Edgar Gonzales Zenteno, Lizbeth Paredes Aguilar, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Remote Sediment Sampling with a Van Veen Grab Sampler", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
- Wonse Jo, Jee Hwan Park, Yuta Hoashi, and Byung-Cheol Min, "Development of an Unmanned Surface Vehicle for Harmful Algae Removal", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link, Video Link
- Shaocheng Luo, Yogang Singh, Hanyao Yang, Jun Han Bae, J. Eric Dietz, Xiumin Diao, and Byung-Cheol Min, "Image Processing and Model-Based Spill Coverage Path Planning for Unmanned Surface Vehicles", 2019 MTS/IEEE OCEANS, Seattle, WA, USA, October 27-31, 2019. Paper Link
- Wonse Jo, Yuta Hoashi, Lizbeth Leonor Paredes Aguilar, Mauricio Postigo-Malaga, José Garcia-Bravo, and Byung-Cheol Min, "A Low-cost and Small USV Platform for Water Quality Monitoring", HardwareX, Vol. 6, e00076, October 2019. Paper Link, Video Link , Source Codes Link